Rosetta, addio Philae?
Era l’11 gennaio scorso quando dal centro di controllo dell’Agenzia Spaziale Tedesca (DLR) facevano sapere che i comandi per “rianimare” il piccolo Phiale erano stati inviati come da programma…
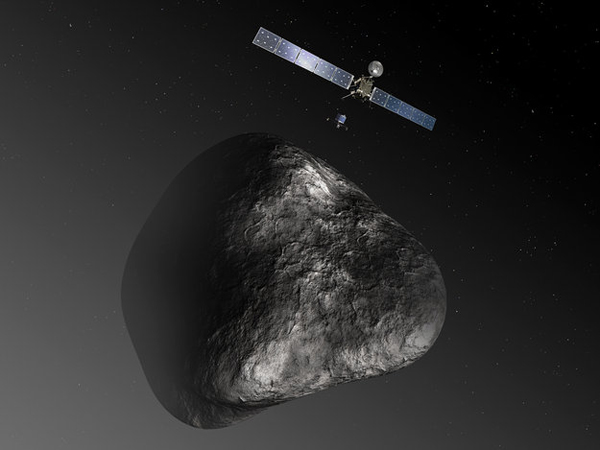 12 novembre 2014: la missione Rosetta dell’Agenzia spaziale europea è entrata nella storia grazie al rilascio sulla cometa 67P Churyumov Gerasimenko del robottino Philae. Grande poco più di una lavatrice, il lander toccò il suolo di 67P diventando così il primo strumento costruito dall’Uomo a raggiungere questo traguardo. Non si trattò di un atterraggio morbido: Philae toccò il terreno e poi rimbalzò su una zona adiacente a quella prevista per l’ancoraggio, incontrando quindi qualche difficoltà a fissarsi al suolo con i suoi artigli meccanici.
12 novembre 2014: la missione Rosetta dell’Agenzia spaziale europea è entrata nella storia grazie al rilascio sulla cometa 67P Churyumov Gerasimenko del robottino Philae. Grande poco più di una lavatrice, il lander toccò il suolo di 67P diventando così il primo strumento costruito dall’Uomo a raggiungere questo traguardo. Non si trattò di un atterraggio morbido: Philae toccò il terreno e poi rimbalzò su una zona adiacente a quella prevista per l’ancoraggio, incontrando quindi qualche difficoltà a fissarsi al suolo con i suoi artigli meccanici.
La sonda Rosetta è ancora attiva ma a settembre si schianterà su 67/P, terminando la sua importante missione.
ASI – Rosetta continuerà le operazioni di ricerca del lander Philae con l’obiettivo di riprenderne le attività. Questo è quanto emerge dalla nota rilasciata dal Tiger Team, un gruppo di esperti voluto dal Lander Steering Committee per fare il quadro dell’attuale situazione di Philae.
Dopo aver analizzato i dati ricevuti nel corso degli 8 contatti avuti tra lander e orbiter nel periodo giugno/luglio 2015, il gruppo di specialisti ha formulato tre possibili scenari che spiegherebbero le difficoltà di stabilire un contatto con la sonda che giace sulla superficie della cometa 67P/Churyumov Gerasimenko dal 12 novembre 2014.
Il primo presuppone che, per effetto delle temperature ambientali estremamente basse, il sistema di comunicazione o qualche altro apparato vitale del lander abbia riportato dei danni tali per cui Philae non riuscirebbe a mettersi in contatto con Rosetta; il secondo spiegherebbe l’assenza di segnali con la polvere cometaria che, depositatasi sui pannelli di Philae a causa della diminuzione dell’attività della cometa dopo aver superato il perielio (metà agosto 2015), avrebbe ridotto la capacità dei suoi pannelli solari di generare potenza elettrica.
L’ultimo scenario, invece, prevede che il lander si sia mosso rispetto alla posizione in cui ha svolto la “First Science Sequence”nella zona nominata Abydos, e che le sue antenne siano invece orientate in un modo diverso da quello presunto non permettendo la ricezione dei segnali provenienti da Rosetta.
“Il terzo scenario lascia uno spiraglio alla possibilità che si possa ripristinare il contatto con Philae e metterlo in condizioni di svolgere ancora indagini scientifiche sulla superficie della cometa – ha commentato Mario Salatti, project manager di Philae per ASI – è però necessario che Rosetta individui il lander e ci dica come sono posizionati i pannelli solari rispetto al Sole e come sono posizionate le sue antenne per ottimizzare le finestre di comunicazione con la sonda”.

Lo scorso 22 gennaio Rosetta si è spostata nella parte sud della cometa e al momento sta orbitando ad un’altezza pari a circa 50 chilometri. Tale distanza viene monitorata di giorno in giorno ed eventualmente ridotta in una misura che garantisca comunque le massime condizioni di sicurezza per la navigazione della sonda.
“E’ una lotta contro il tempo – ha concluso Salatti – con l’attività della cometa in costante diminuzione, Rosetta può avvicinarsi sempre di più alla sua superficie: quando sarà in grado di avvicinarsi ad almeno 10 chilometri potrà risolvere adeguatamente la figura di Philae nelle immagini di OSIRIS. Allo stesso modo però, le condizioni energetiche necessarie per l’accensione del lander vanno peggiorando man mano che la distanza dal Sole aumenta. ESA valuterà di fare un “flyby” ravvicinato alla zona Abydos nelle prossime settimane, ma sull’effettiva esecuzione della manovra peserà enormemente l’esigenza di non mettere a repentaglio la sicurezza della sonda Rosetta”.
ROSETTA ORBITER AND GROUND SEGMENT
 | Australia |
| Contractor | Contracted Item |
| Telstra | New Norcia antenna |
| Western Power | New Norcia antenna |
 | Austria |
| Contractor | Contracted Item |
| Austrian Aerospace | Telemetry and telecommand special check-out equipment (SCOE) |
| Multi-layer insulation |
| Steyr Daimler Puch | Louvres |
| Siemens | Special check-out equipment (SCOE) |
 | Belgium |
| Contractor | Contracted Item |
| Alcatel ETCA | Attitude and orbit control measurement system interface unit (AIU) DC/DC hybrids |
| Remote terminal unit (RTU) DC/DC hybrids |
| AMOS | Batteries |
| Logica | Support to avionics |
| Nexans (formerly Alcatel Fabrisys) | Spacecraft harness |
| Rhea | Consultancy support |
| Spacebel | Software validation facility (SVF) – software development environment (SDE) design specification |
 | Canada |
| Contractor | Contracted Item |
| SED System inc. | New Norcia antenna |
 | Denmark |
| Contractor | Contracted Item |
| Terma | Lead of central checkout system (CCS) |
| Power control unit |
| Software validation facility (SVF) |
| Turbinegarden | Database engineering support |
 | Finland |
| Contractor | Contracted Item |
| Patria Finavitec | Power distribution unit / thermal control unit (PDU/TCU) |
| Platform structure |
 | France |
| Contractor | Contracted Item |
| Alcatel | Support to Prime contractor (Astrium GmbH) |
| Pressurant tanks |
| Pressure regulator |
| Astrium SAS | Central checkout system (CCS) software |
| Avionics major subcontractor Lead |
| Solid state mass memory (SSMM) memory boards |
| SEP | Transducer |
| Thomson Tube Electronics | Travelling wave tube amplifier (TWTA) tubes |
 | Germany |
| Contractor | Contracted Item |
| ASE | Solar array |
| Astrium GmbH | Thrusters (10N) |
| Prime Lead |
| Propellant tanks |
| System Consulting | Lander support |
| Timetech | Ultra stable oscillator (USO) |
 | Hungary |
| Contractor | Contracted Item |
| KFKI | Lander support |
 | Ireland |
| Contractor | Contracted Item |
| Captec | Independent software validation facility (SVF) |
 | Italy |
| Contractor | Contracted Item |
| Alenia | Assembly, integration and verification (AIV) major subcontractor Lead |
| Transponder |
| Officine Galileo (formerly FIAR) | Navigation camera & startracker Lead |
| Solar array photovoltaic assembly (PVA) |
| TOPREL | Coordinated part procurement agency |
 | The Netherlands |
| Contractor | Contracted Item |
| Bradford | Back-up landing gear |
| Chess | Software validation facility (SVF) sham board specification |
| Software validation facility (SVF) Sun Silver maintenance |
| Fokker | Solar array |
| Satellite Services | Telemetry/telecommand (TM/TC) fee |
| RF suitcase |
| Spacecraft interface simulator (SIS) equipment |
| TNO-TPD | Sun acquisition sensor |
 | Norway |
| Contractor | Contracted Item |
| Det Norske Veritas | Reliability, availability, maintainability and safety (RAMS) tasks |
| Kongsberg | Solar array drive mechanism (SADM) equipment |
| Supply of ground support equipment (GSE) and support |
| Prototech | Structural thermal model (STM) dummies |
| Raufoss | Valves |
 | Spain |
| Contractor | Contracted Item |
| Alcatel Espacio | Radio frequency distribution unit (RFDU)/waveguide interface unit (WIU) |
| Solar array drive electronics (SADE) |
| Attitude and orbit control system (AOCS) interface unit (AIU) |
| Remote terminal unit (RTU) |
| CASA | Medium-gain antenna |
| Crisa | Startracker & navigation camera electronic unit |
| Sener | Startracker & navigation camera baffle |
| Hipparcos recommendation |
| Experiment booms |
| Louvres |
| Tecnológica | Coordinated part procurement agency |
 | Sweden |
| Contractor | Contracted Item |
| Saab Ericsson Space | High-gain antenna |
| Low-gain antenna |
| Command and data management unit (CDMU) lead |
| Solid state mass memory (SSMM) lead |
 | Switzerland |
| Contractor | Contracted Item |
| Alcatel ETCA | Travelling wavetube amplifier (TWTA) |
| Alcatel Space | Electrical ground support equipment (EGSE) simulator |
| APCO | Mechanical ground support equipment (MGSE) |
| Quality assurance (QA) co-location for structural thermal model (STM), assembly, integration and test (AIT) |
| Captec | Independent software validation (ISV) engineering support |
| Clemessy | Power pyro special check-out equipment (SCOE) |
| Test batteries |
| Contraves | Solar array |
| Thermal support |
| ETEL | Antenna pointing mechanism electronics (APME) for high-gain antenna |
| Helbling | Software quality assurance (QA) |
| HTS | High-gain antenna |
| Mecanex | Brackets |
| Reliability engineering support |
| RST | Software development environment (SDE) tools procurement |
 | United Kingdom |
| Contractor | Contracted Item |
| AEA Technologies | Batteries |
| Astrium Ltd. | Platform major subcontractor lead |
| Reaction wheel unit |
| BAE Systems (formally MRC) | High-gain antenna |
| Hunting/Insys | Alternative landing gear equipment |
| Logica | Onboard software autonomy |
| Polyflex | Non-return valves |
| Satasint | Support of assembly, integration and verification (AIV) team |
| SciSys | Satellite control and operations system |
| Vega | Support of assembly, integration and verification (AIV) team |
| Electrical ground support equipment (EGSE) support |
 | United States |
| Contractor | Contracted Item |
| Conax | Pyro valves |
| Honeywell | Inertial measurement package |
| Starsys | Louvres |
| Vacco | Filters |